How I made a Ball and Plate Doohickey
(NEW for 2008: Google code account with SVN code)
(NEW for 2008: Section on 3 actuator control added)
(NEW for 2008: lots of equations corrected)
If anyone has questions, or wants my code in order to try this at home, just write me.
kenn /\T EISSQ d0t c_o_m.
Fete de la Science, Dijon 2005.
Introduction
Physical Construction and Design
Mathematical Theory and Application
Simulacrum and Simulation
- Choice of computer and operating system
- Finding the ball
- Recreating the state vector
- Closed-loop
control
Conclusion and Current State of Affairs
Appendix
- Pea and Spoon effect
- Automatic Dial Reader
- Camera Calibration Code
- Observer and Observability
- Controller and Controllability
Introduction
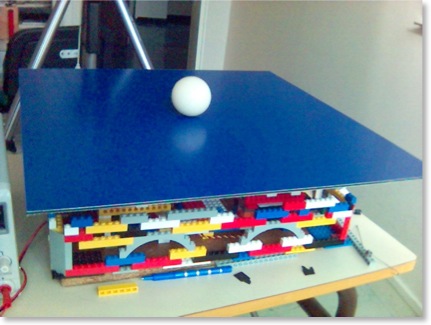
This website describes a project to build a functioning ball and plate (B&P) system. The material of choice was legos. While it's not perfect, it does work and I can send the ball where ever I want without fear of it falling off the table.
To begin, let's answer the question, “Why?”
A B&P system is the two dimensional analog to the ball and beam (B&B) system that I will first describe. The B&B is a classic example of open-loop control dynamics. The problem is of particular interest because the system is open-loop unstable, meaning that once the ball is moving it will roll off the end if no action is taken. This as opposed to an open-loop stable system, such as a ball in a bowl, where if the ball is nudged it will simply oscillate inside the bowl for infinity-- or until friction brings it to a halt, whichever comes first.
The position of the ball is usually measured through the use of a resistance sensor. The ball is made of some metallic material, a steel ball-bearing for instance, and bridges the gap between two metallic bars. As the ball rolls up and down the bars, this increases or decreases the resistance of the bar/ball/bar system. The overall resistance gives a very precise indication of where the ball is.
The Ball & Plate system is the 3-D evolution of the Ball & Beam. It includes both x- and y- dimensions allowing the ball to roll along different paths from its initial point to its final point. This is of great scientific interest because it allows us to control both position and orientation, thereby opening up another field of robotics, that of trajectory planning.
Overall, there are five distinct phases of development, all of which I hoped to achieve (but only two and three-quarters of which I did so far):
1.) Simple stabalization of the ball. We wish to have the ball rest immobile in the center of the plate.
2.) Simple command of the ball. The idea here is to be able to place the ball anywhere on the plate. This is not much more difficult than the first case, as the plate is uniformly flat, and thus any location where we stabilize can be seen as the set-point.

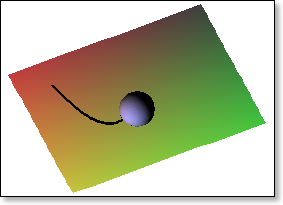
Trajectory planning can get even more complicated if I ask the ball to roll around randomly placed obstacles.
4.) Non-admissible trajectory planning. Now we draw an X on top of the ball (Or we can just take an eight-ball. Would that make if magic?). If we constrain the X to never deviate from its position, it is quite obvious that the ball cannot move. However, if we relax this constraint a tad bit to let it deviate, say, 10 degrees from the vertical, the ball can now roll forward and we can attempt to bring it to another spot.
5.) Instead of preventing the X on the ball from leaving the vertical, we will now allow it to go anywhere it wants, so long as we finish at the given destination with a given orientation. This is a very difficult problem, the mathematics and kinematics of which have not yet been fully explored, not to mention the problems associated with losing sight of the X as the ball rolls and trying to recuperate it as it rolls out from underneath.
The B&P can have several direct applications, such as a robotic manipulator for round-ish parts. Indirect applications, such as controls engineering demonstrations, should not be forgotten either.
Finally, to the question, “Why me?” I created this table as the thesis project for my Master's in Robotics and Controls at the Universtité de Bourgogne, with the sub-objective to make it completely out of legos. It's primary interest to me was first that it looked cool and second sounded fun.
Secondly, the apparatus is being used to teach young children what engineering is and can do, having been displayed at numerous science festivals, among them the Fête de la science in Dijon, France, the SISSA Open Day at Trieste, Italy, and many exhibits in Luxembourg. A new version has entered service as a lab instrument for controls and robotics courses at the Universtité de Bourgogne.
Visitors since 4PM on February 19th, 2006 (Hello hackaday):